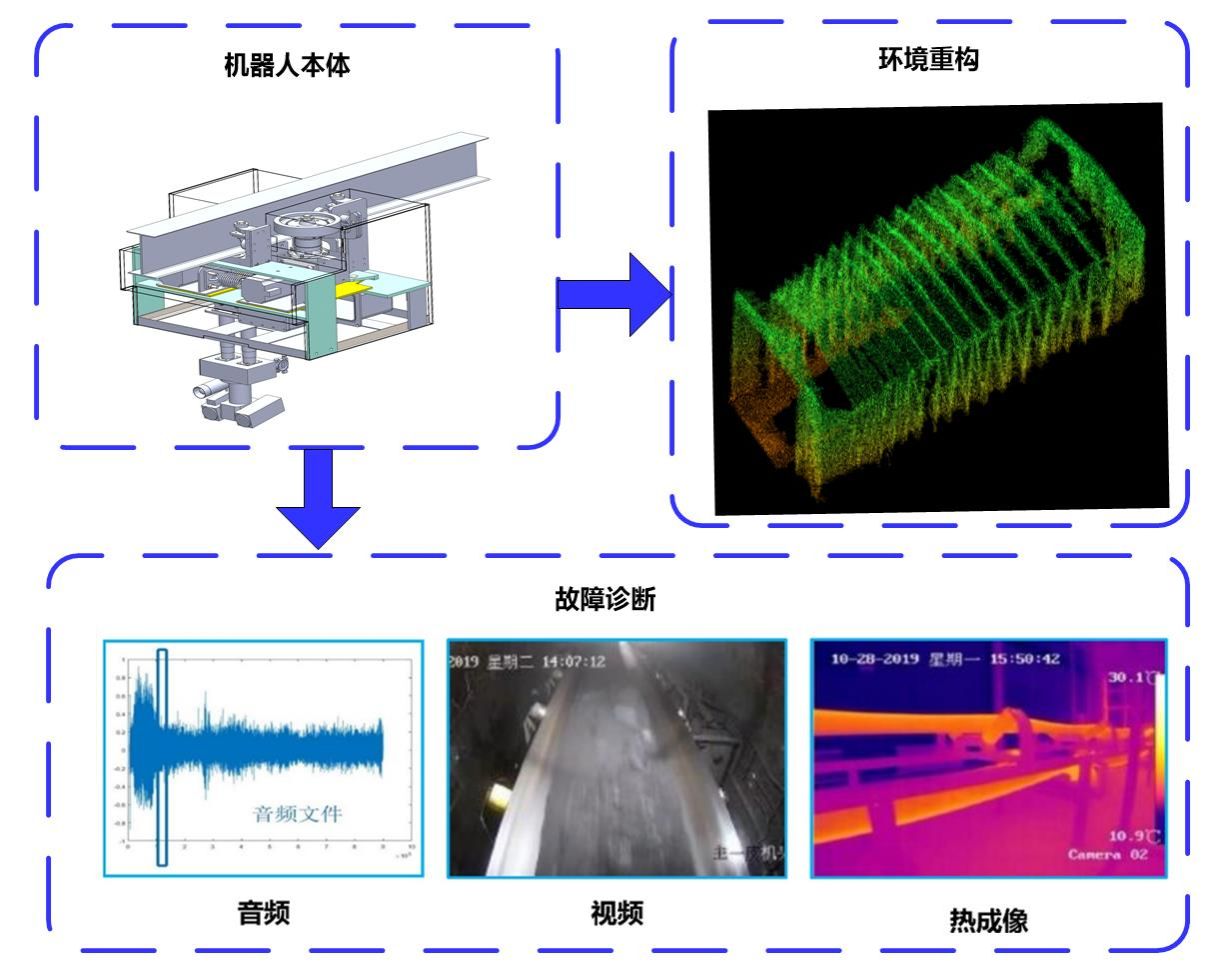
煤矿井下人员-装备-环境的状态影响着煤矿生产的效率与安全,传统人工巡检主要依靠巡检人员的现场经验,存在效率低、可靠性差、劳动成本高等缺点。团队据此研究多传感数据融合的机器人定位、设备故障诊断、环境信息重构等理论,为研制能够减少井下作业人数、降低安全风险、提高生产效率的煤矿巡检机器人提供关键技术和科学依据。
【关闭】